“苏集创”是依托苏州大学国家技术转移中心(苏州大学知识产权运营中心),紧密围绕苏州产业创新集群布局,以苏州大学等国内外知名高校、科研院所、技术创新中心的集成创新成果为标的,构建科技、产业、资本深度融合的成果发布平台。
本期向大家推介的是苏州大学机电工程学院钟博文教授团队的项目:《基于压电驱动的纳米闭环控制系统》。
主要成果完成人:钟博文教授,苏州大学机电工程学院。主要研究领域:1.压电驱动和控制技术;2.跨尺度精密定位技术;3.高通量显微检测技术。
成熟程度:研制
应用产业领域:生物技术与医药、半导体、装备制造
成果简介:
压电陶瓷致动器作为新型微位移器件,具有体积小,驱动力大,分辨率高,响应快,易于控制等优点,可在低温、真空环境下使用,故而在精密机械当中得到广泛的应用。然而,压电陶瓷具有一般铁电材料所具有的共性:迟滞非线性。这给压电陶瓷的运用带来了一定的难度和障碍。本团队研发的压电驱动的闭环控制系统,成功消减了压电陶瓷的迟滞特性所带来的不良影响,使得精密控制定位技术的可靠性大大提高。

图1:基于压电驱动的闭环控制系统的PPC精密定位控制器
创新要点:
1.基于Bouc-wen模型,将形状控制函数的取值分为多个独立取值的阶段,这些取值具有非对称性,从而建立压电驱动的非对称实质模型,并进行离散化处理。据此预先建立迟滞补偿器,将各时刻压电陶瓷制动器预设的目标位移作为输入,得到压电陶瓷致动器在个时刻与所述目标位移对应的输入电压。将各时刻的输入电压作用于压电陶瓷制动器,得到压电陶瓷制动器在个时刻对应的实际输出位移。

图2:迟滞补偿原理图
2.获取运动快的目标位置和目标速度,并获取运动块的当前位移和当前速度。在当前速度与目标速度不同时,基于PID控制算法调节驱动信号的信号频率,以调节运动块的当前速度;根据当前位移确定运动块与目标位置之间的距离,在小于扫描距离时,基于PID控制算法使用粘滑式惯性压电驱动器,驱动运动块向目标位置进行纳米级运动。实现对位置和速度的双重调节,提高了压电驱动器的驱动精度。
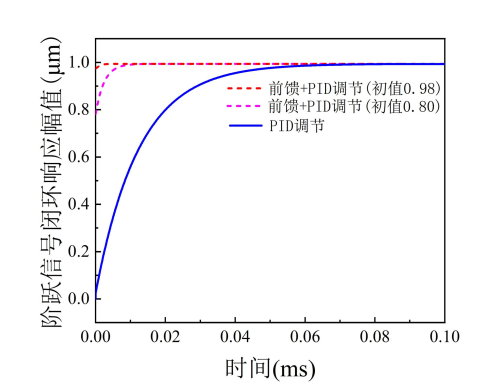
图3:阶跃信号的PID算法调节,有效提高精密度
技术指标:
1.峰值电流0.5A
2.输出电压纹波<30mV
3.闭环控制精度最高可达10nm
4.输入功率150W
5.频率响应达1000Hz
